This is an old revision of the document!
Aufbau Mini-Talon
Übersicht
 Bild 1: Der X-UAV Mini Talon aufgebaut
Bild 1: Der X-UAV Mini Talon aufgebaut
Generelles zum Kleben
Alle Klebverbindungen zum Styropor (EPO in Wahrheit) werden mit UHU Por Kleber gemacht. Dieser Kleber muss beidseitig aufgetragen werden und dann mindestens 10 Minuten trocknen (die Flächen müssen sich trocken anfühlen). Danach kann man die Flächen zusammendrücken. Die Festigkeit hängt vom maximalen Druck ab mit dem man die beiden Teile zusammendrückt.
Servos in Flügel einkleben
Vor dem Einbau muss man die Servos mit einem Servotester in die Mittelstellung bringen. Das Servohorn wird so befestigt, dass es die maximale Servoauslenkung vor und zurück machen kann. Das muss man vor dem Einkleben im eingebauten Zustand mit dem Servotester ausprobieren. Dazu sollte auch die Stange zum Ruder schon befestigt sein, sonst liegt evtl. die Stange wie in Bild 4 dargestellt auf. Die Stange soll im mittleren Loch des Servohorn befestigt sein. Die Servos werden dann in die vorgesehen Einbauaussparungen eingeklebt und schliessen bündig mit der Flügeloberfläche ab.
 Bild 1: Der Servo ist in Mittelstellung
Bild 1: Der Servo ist in Mittelstellung
 Bild 2: Servo mit maximalem Ausschlag nach vorn zur Flügelvorderkante
Bild 2: Servo mit maximalem Ausschlag nach vorn zur Flügelvorderkante
 Bild 3: Servo mit maximalem Ausschlag nach hinten
Bild 3: Servo mit maximalem Ausschlag nach hinten
 Bild 4: Falscher Einbau. Die Stange liegt auf dem Flügel auf und biegt sich durch.
Bild 4: Falscher Einbau. Die Stange liegt auf dem Flügel auf und biegt sich durch.
In Bild 4 ist ein fehlerhafter Einbau zu sehen. Die Stange liegt beim Maximalausschlag des Servos auf dem Flügel auf und biegt sich durch. Der Servo brummt in dieser Position.
Nach unserem ersten Absturz mit dem Minitalon nehmen wir nun im zweiten Anlauf folgende Änderungen vor:
- Die Flügel erhalten an der Unterseite schwarze Streifen, damit unser Flieger besser die Orientierung behalten kann. Das ist zwar fürs autonome Fliegen irrelevant, aber nicht unpraktisch zum Ausprobieren.
- Das Rad lassen wir diesmal gleich weg, da es keinerlei Funktion bietet.
- An den Servohebeln müssen wir Konterschrauben anbringen, da die Schrauben ansonsten abfallen.
- Die Anbringung des Motors war im letzten Flugzeug nicht gut. Das Holz ist aufgesplittert, außerdem war das Motorkreuz offenbar falsch herum angeschraubt.
- Die Kufe am Ende bricht zu leicht weg. Wir werden uns deshalb eine Lösung aus Plastik von Thingiverse holen.
Im Folgenden die Schritte des Neuaufbaus, hier verzeichnet für zukünftige Generationen:
- Servos in Freddys Flügel waren noch vom vorherigen Aufbau komplett in Ordnung und werden, mit schwarzen Verzierungen, übernommen. Es ist darauf zu achten, dass die Servos in der Grundstellung auch den Flügel überhaupt nicht ausgelenkt werden. Das geht mit einem Servotester. Außerdem müssen die Stangen senkrecht zum Servo sein, man sollte sie also auf die richtige Seite legen. Übrigens sind die Löcher vom Servo zu klein, die muss man ein wenig vergrößern. Am Servo benutzen wir das mittlere Loch.
- Der Holzkasten in der Mitte wird so zusammengeklebt, dass oben, wo die Löcher sind, auch die Einbuchtungen von der Vorder- und Hinterseite sind. So passen dann auch die Lochverstärkungen noch hin. Hält aber auch ohne. Anschließend bauen wir den gelben Boden, den wir von Thingiverse heruntergeladen und ausgedruckt haben, mit ein. Ein einfacher Klettverschluss hält später den Autopiloten. Das Ganze sollte dann wie folgt ausschauen: Bild
- Für das V-Leitwerk müssen die Servos eingebaut werden. Außen am V-Leitwerk befinden sich die schwarzen Stangen. Man muss den Servo jetzt so einbauen, dass das Kabel in den Kabelkanal gelegt werden kann. Das Horn sollte nach vorne geneigt sein. Wir benutzen das äußerste Servoloch und dass mittlere Hornloch. Das Horn muss man natürlich einkleben, beim Servo langts, wenn man auf beiden Seiten Klebeband anbringt. Das kann dann alles jetzt schon an den Rumpf geklebt werden. Dabei die Kabel innen durch die Öffnung führen. Vorm Festkleben Servos nochmal testen. Das muss am Ende wie folgt aussehen:
- Der Nasenkasten muss einfach so zusammengeleimt werden, wie er zusammen passt. Bild:
- Nasenkasten und Mittelkasten können schon an eine Seite des Rumpfes geklebt werden, genauso wie die beiden Holzstege. Der lange Holzsteg muss vorne hin, der kurze hinten. Die Muttern müssen nach unten. Die Löcher müssen so liegen, dass sie mit den Löchern des Deckels übereinstimmen. Bild
- An den Motor haben wir das Gegenstück zum ESC Stecker gelötet, um nicht immer die drei einzelkabel einstecken zu müssen. Dabei steht schwarz auf plus, rot auf minus, und gelb in dem dritten Loch. Beim Motor ist weiterhin darauf zu achten, dass das Kreuz so angeschraubt ist, dass die Schrauben komplett versenkt werden können. Der Propeller sollte mit der Beschriftung nach vorne zeigen und rechtsdrehend sein. Wir haben Größe 9 genommen. Bild:
Aufbau: Motor – Propeller – Distanzstück – Unterlegscheibe – Mutter - Den Deckel muss man noch ein bisschen vorbereiten, bevor man ihn benutzen kann. Erstes ist er an der kleinen Stange sehr dünn und kann dort leicht brechen, deshalb muss man da mit Klebeband nachhelfen. Zweitens passen die großen Akkus nicht gut ins Flugzeug, deswegen schneidet man Teile vom Rumpf ab und klebt sie an den Deckel. Drittens haben wir noch ein Loch für die Antennen eingefügt. Und Viertens haben wir innen ein kleines Stück Klettband befestigt, wo das GPS Modul angebracht wird. Dabei ist darauf zu achten, dass der kleine Pfeil auf dem Modul nach vorn zeigt. Das sieht dann wie folgt aus:
GPS/Kompass vorne
Das GPS/Kompasssystem wird vorn auf der Spitze befestigt. Dazu wird die Platine mit 2.5 x 6mm Blechschrauben mit Linsenkopf in die Halterung eingeschraubt. Die Halterung wird vorn verklebt. Die Stecker sind in Richtung des Lochs ausgerichtet.
 Bild xxx: GPS / Kompass in Halterung auf der Spitze
Bild xxx: GPS / Kompass in Halterung auf der Spitze
Flügel am Rumpf befestigen
Die Flügel werden an den Stangen, die durch den Rumpf gehen jeweils mit einer Schraube befestigt. Die Schraube kann mit einem Inbusschlüssel angezogen werden.
 Bild XXX: Schraube zur Befestigung des Flügels an der Stange
Bild XXX: Schraube zur Befestigung des Flügels an der Stange
Schwerpunkt
Der Schwerpunkt sollte bei erstmal 55mm von der Flügelkante sein.
Siehe: http://www.itsqv.com/QVM/index.php?title=How_To_-_Hand_Launch_an_X-UAV_Mini_Talon
Gewichtsliste der Bauteile:
BAUTEIL [g] 10Ah-Akku, verkabelt 970 L. Flügel & Querruder & kl. Rohr 167 R. Flügel & Querruder & gr. Rohr 165 Motor, verkabelt 126 R. Rumpfhälfte & Leitwerk 117 L. Rumpfhälfte & Leitwerk 117 ESC, verkabelt 52 Pi-Akku, verkabelt 33 Rechte Seitenwand 22 Linke Seitenwand 22 Haken 22 GPS/Kompass, verkabelt 20 Deckel 16 Akkuhalterung (& Klettband) 15 Kompasshalterung 14 Zwischendecke 13 Pi & Kamera 13 Propeller 11 Pixracer 11 Vorderwand & Mutter+Schraube 9 Hinterwand & Mutter+Schraube 9 Pi-Halterung 9 Kufe mit Finne 7 Motorhalterung 3 SUMME 1963
Telemetrie
Um auf der Fernbedienung auch Telemetriedaten empfangen zu können, muss ein extra Kabel gebaut werden, das Daten vom FRSky und Telem2 Port zum FrSky XSR-M Transmitter übeträgt.
https://docs.px4.io/assets/flight_controller/pixracer/grau_b_pixracer_frskys.port_connection.jpg
https://docs.px4.io/assets/flight_controller/pixracer/grau_setup_pixracer_top.jpg
https://www.frsky-rc.com/product/xsr-m/
TODO
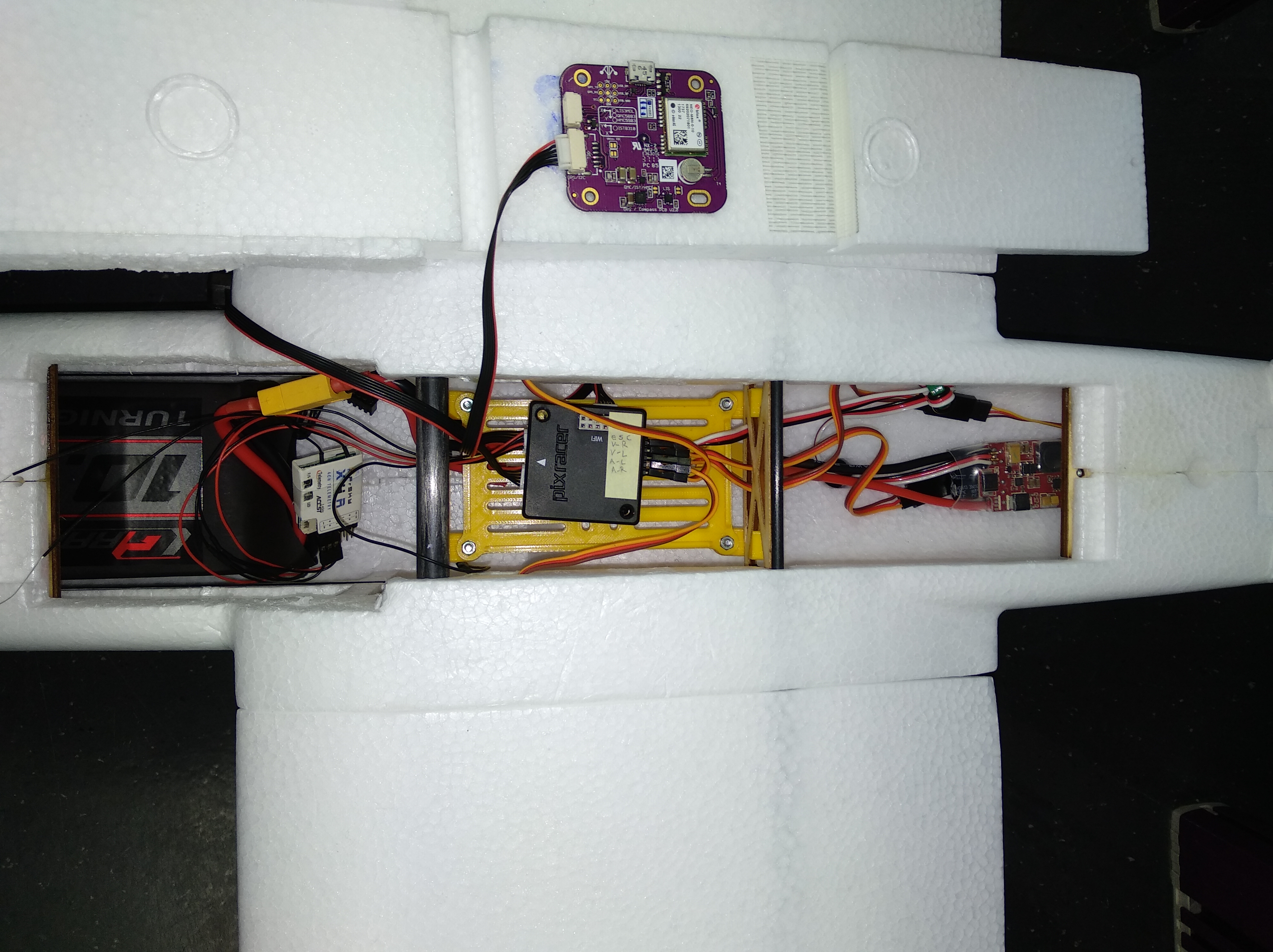
===== Anordnung Innereien =====
{kind=link}
{kind=link}