


Vom 20. September bis zum 5. Oktober 2021 haben wir in Zusammenarbeit mit Sea-Watch e.V. Flugtests auf der Sea-Watch 4 gemacht. Die Tests wurden auf einer Überführungsfahrt für einen Werftaufenthalt des Schiffs von Trapani in Sizilien nach Burriana in Spanien gemacht. Die Drohne hat Flugtests in verschiedenen Höhen gemacht. Die Schlauchbootteams von der Sea-Watch 4 haben die Drohne nach der Wasserlandung geborgen. Gleichzeitig dienen die Schlauchboote auch als exemplarische Testboote für die Suche nach Schiffbrüchigen. Die Drohne wurde vom Deck vor der Brücke aus gestartet. Nach dem Flug landet die Drohne im Wasser und wird von einem Schlauchboot geborgen.
Um möglichst viele Bilder von Booten auf Wasser zu sammeln wurde ein 2 km x 2 km großes Gebiet mit verschiedenen Anflugwinkeln und Höhen überflogen. Ein solches Flugmuster wie in Bild 1 dargestellt hat eine Gesamtflugstrecke von etwa 70 km. Ein echtes Suchmuster hätte einen Abstand von 2km zwischen den Fluglinien, da wir eine Suchbreite von etwa 2km mit unseren Kameras abdecken, d.h. wir suchen einen etwa zwei Kilometer breiten Streifen unter der Drohne mit den Kameras ab. Ein Flug mit einer Flugdistanz von 70km deckt also bei einem echten Sucheinsatz eine Fläche von 140 Quadratkilometern ab.
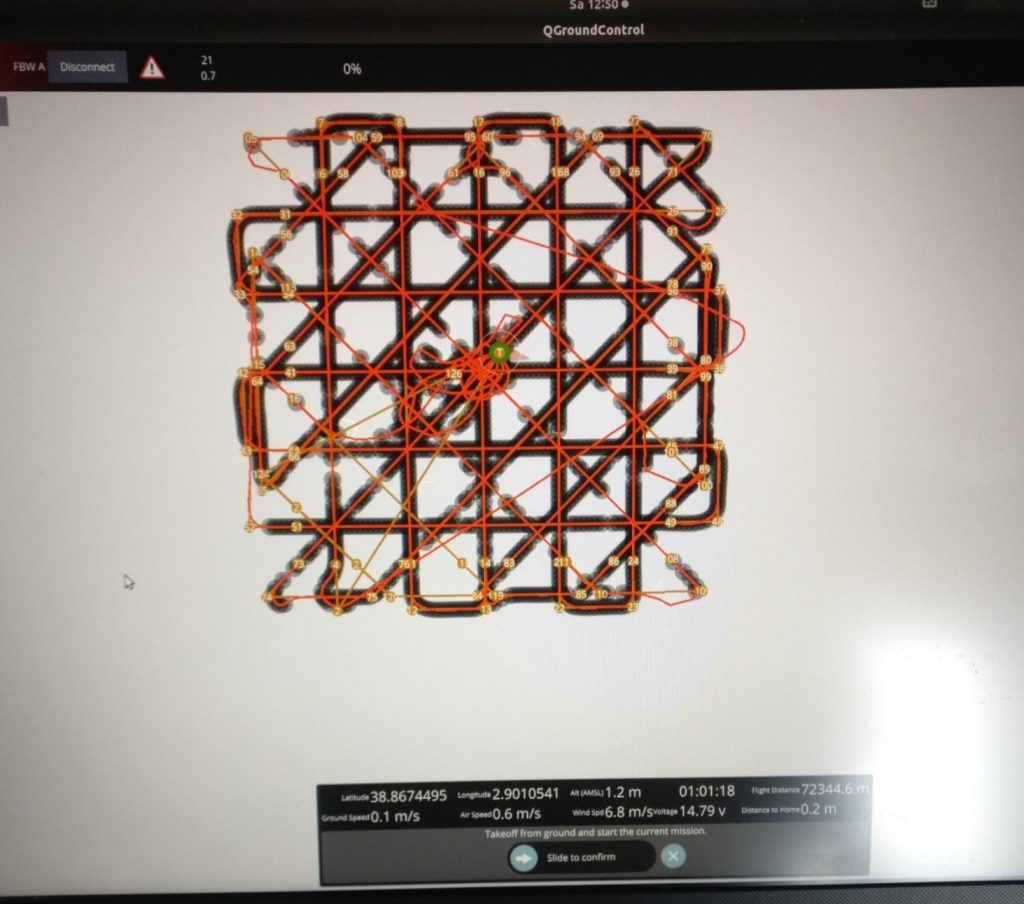
Die Zielflughöhe der Drohne beträgt 550m über dem Meer. In 12 Flügen wurden verschiedene Tests bei 200m, 400m, 550m und 700m zu unterschiedlichen Tageszeiten und Wetterbedingungen geflogen. Die gesammelte Datenmenge umfässt 110GB in ca. 23000 Bildern. Im folgenden Bild 2 ist neben der Sea-Watch 4 noch ein Schlauchboot… (siehe Originalbild).
{kind=link}
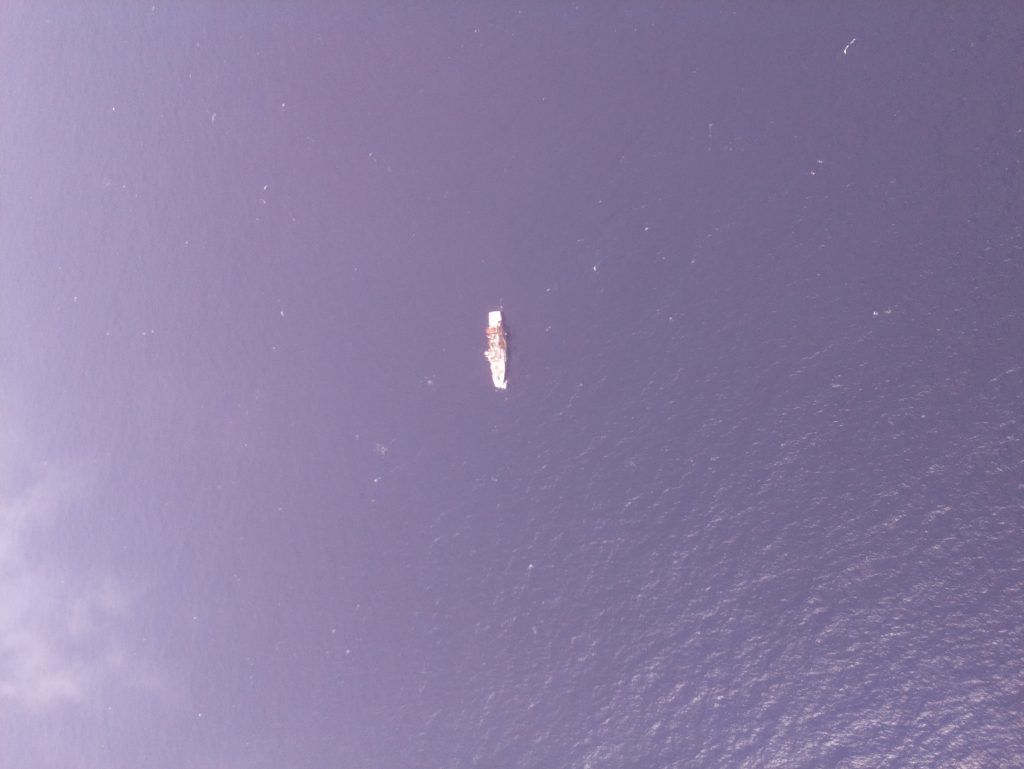
Die Bilder haben eine Auflösung von 3280 x 2464 Pixeln und werden mit einer Raspberry Pi V2 Kamera aufgenommen. Auf der Drohne sind zwei Kameras, die jeweils mit 30 Grad seitlich nach unten ausgerichtet sind. Damit habe wir jetzt erstmals Bilder aus der Zielhöhe von realistischen Booten unter realistischen Bedingungen aufgenommen.

In Bild 3 ist ein vergrößerter Ausschnitt aus dem Bild 2 dargestellt. Auch hier sind zwei Boote auf dem Bildausschnitt. Die Auswertung der Bilder wird mit der SearchWing Bildanalysesoftware unterstützt, die auf die Auswertung der Bilder aus See abgestimmt ist.

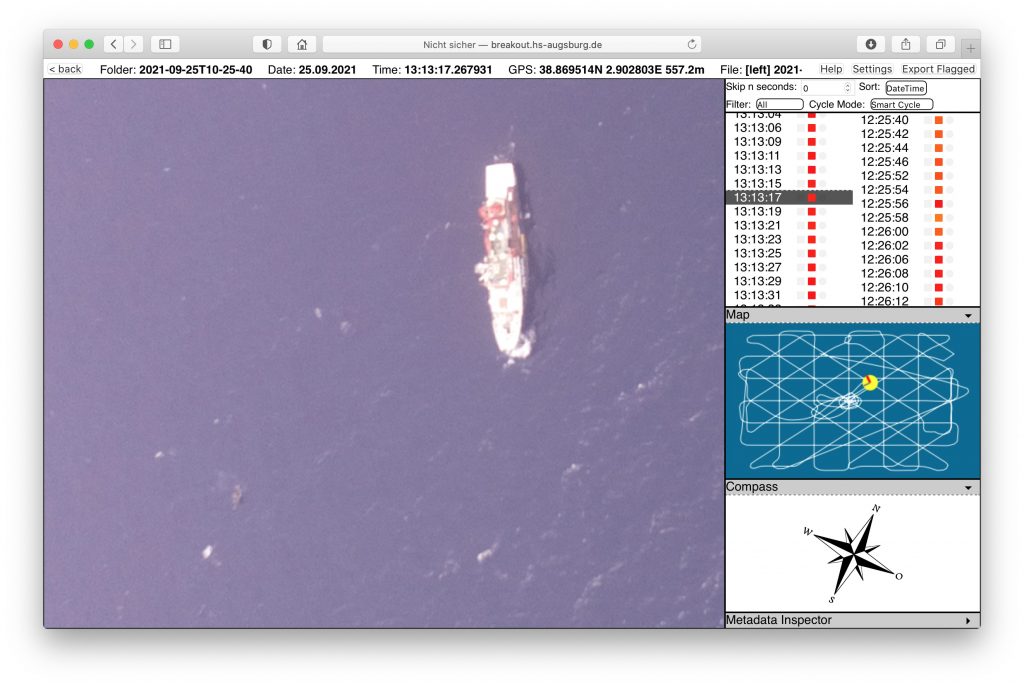
Bild 4 zeigt die Ansicht des Fotos in der SearchWing Bildanalysesoftware. Die Software arbeitet webbasiert und kann einfach im Browser aufgerufen werden. Die dargestellten Aufnahmen wurden bei starkem Wind aufgenommen und man kann erkennen, dass die Software viele Wellen und Schaumkronen als mögliche Boote markiert. Für jedes Bild werden die Position der Drohne zum Zeitpunkt der Aufnahme, die Flugrichtung der Drohne und die Ausrichtung des Bildes in Bezug auf die Himmelsrichtung dargestellt.
In Bild 5 ist der Bildausschnitt ohne Markierungen der automatischen Objekterkennung dargestellt.

Bild 6 zeigt den Bildausschnitt mit den Markierungen der automatischen Bildauswertung. Mit den neu gesammelten Daten kann die maschinelle Bildauswertung weiter verbessert werden.
Wie schon bei der Testmission mit Resqship e.V. hat sich der Start und die Bergung der Drohne als unproblematisch erwiesen. Probleme bei der Übertragung des Missionsplans und dem Parameterdownload müssen noch untersucht werden. Die Rückmeldung von der Crew auf der Sea-Watch 4 war positiv und hilfreich. Nach Einschätzung der Crewmitglieder kann die Drohne bei der Suche nach Schiffbrüchigen sehr hilfreich im Vergleich zur Suche mit Ferngläsern sein. Die wasserdichte Unterbringung der Batterie ist noch nicht zufriedenstellend. Wir sind jedenfalls sehr glücklich jetzt erstmals echte Fotos zu haben, die von unserem Drohnensystem auf dem Mittelmeer gemacht wurden.
Wir bedanken uns herzlich bei Sea-Watch e.V. für die Unterstützung bei den Drohnentests auf See.