


From September 20 to October 5, 2021 we did flight tests on the Sea-Watch 4 in cooperation with Sea-Watch e.V.. The tests were made on a transfer trip for a shipyard stay of the ship from Trapani in Sicily to Burriana in Spain. The drone did flight tests at various heights. The inflatable boat teams from Sea-Watch 4 rescued the drone after it landed in the water. At the same time, the inflatable boats also serve as exemplary test boats for the search for shipwrecked people. The drone was started from the deck in front of the bridge. After the flight, the drone landed in the water and was recovered by an inflatable boat.
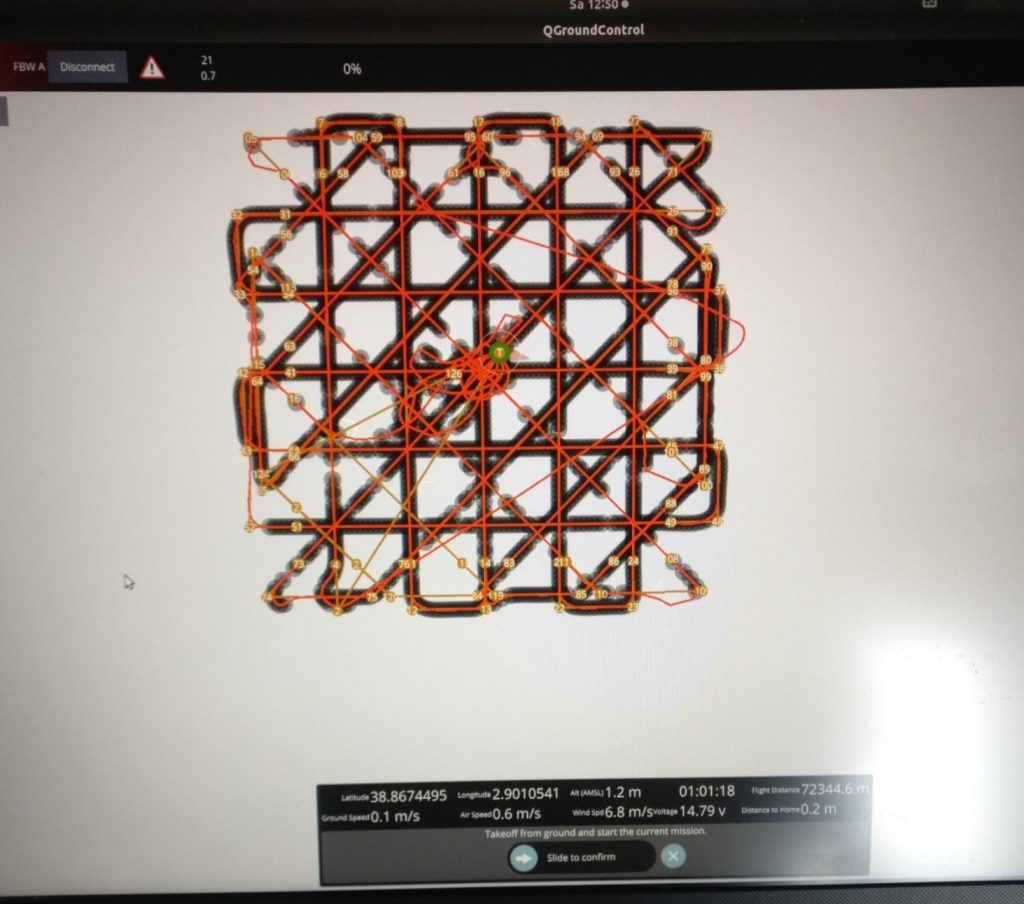
To collect as many images of boats on water as possible, a 2 km x 2 km area was flown over with different approach angles and heights. Such a flight pattern as shown in Figure 1 has a total flight distance of about 70 km. A real search pattern would have a distance of 2km between flight lines, since we cover a search range of about 2km with our cameras, i.e., we search a strip about two kilometers wide below the drone with the cameras. So a flight with a flying distance of 70km covers an area of 140 square kilometers in a proper search mission.
The target flight height of the drone is 550m above sea level. In 12 flights, different tests were flown at 200m, 400m, 550m and 700m at different times of the day and weather conditions. The amount of data collected comprises 110GB in about 23000 images. In the following picture 2 there is a inflatable boat next to the Sea-Watch 4…. (see original picture).
{kind=link}
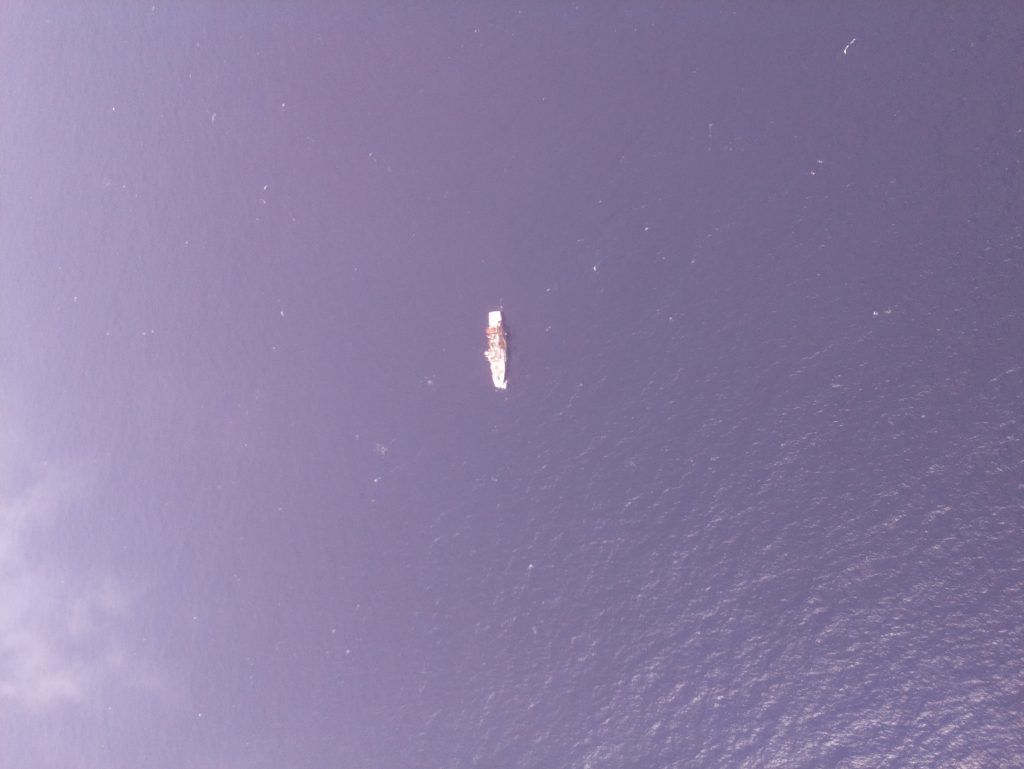
The images have a resolution of 3280 x 2464 pixels and are captured with a Raspberry Pi V2 camera. There are two cameras on the drone, each with a 30 degree downward sideways angle. This is the first time we have taken pictures from the target height of realistic boats under realistic conditions.

Figure 3 shows an enlarged section of figure 2. In this case, too, there are two boats on the picture detail. The evaluation of the images is supported by SearchWing image analysis software, which is adapted to the evaluation of images from the sea.

Figure 4 shows the view of the photo in the SearchWing image analysis software. The software is web-based and can be easily accessed in a browser. The images shown were taken in high winds and it can be seen that the software highlights many waves and white crest as possible boats. For each image, the drone’s position at the time of capture, the drone’s direction of flight, and the orientation of the image with regard to the compass direction are shown.
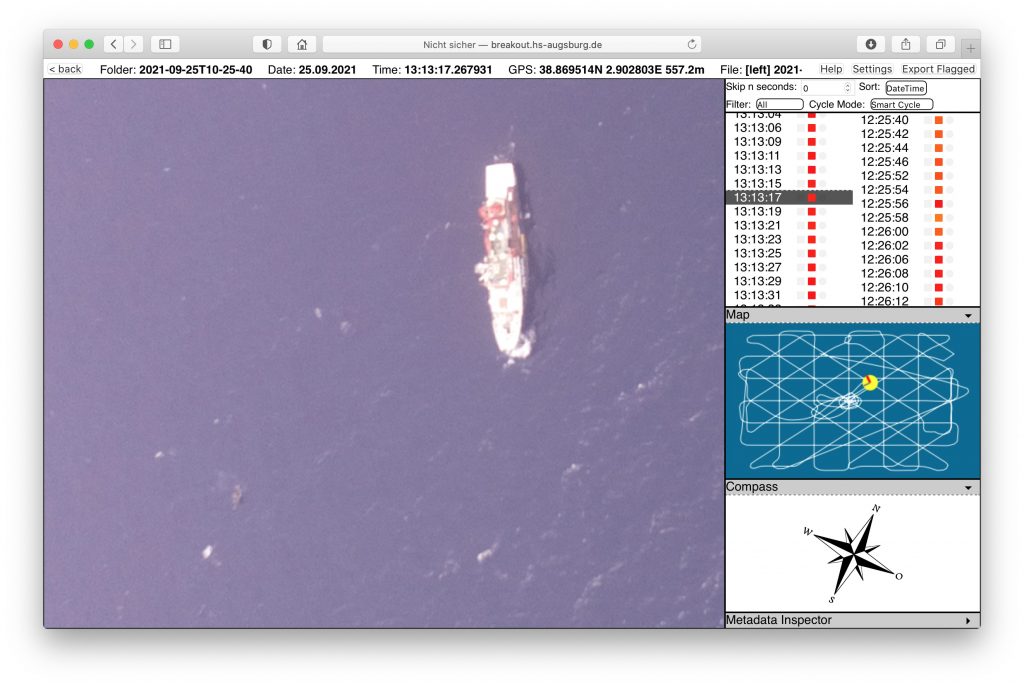
Figure 5 shows the image section without any markings of the automatic object recognition.

Figure 6 shows the image section with the markings of the automatic image evaluation. With the newly collected data, the machine image evaluation can be further improved.
As during the test mission with Resqship e.V., the take-off and recovery of the drone proved to be unproblematic. Problems with the transfer of the mission plan and the parameter download still need to be investigated. Feedback from the crew on Sea-Watch 4 has been positive and helpful. According to crew members, the drone can be quite helpful in searching for shipwrecked people compared to searching with binoculars. The waterproof housing of the battery is not yet satisfactory. We are very happy to have now, for the first time, real photos taken by our drone system on the Mediterranean Sea.
We would like to thank Sea-Watch e.V. for their support during the drone tests at sea.